| ファイル | |
| 言語 |
英語
|
| 著者 |
谷口 隆雄
|
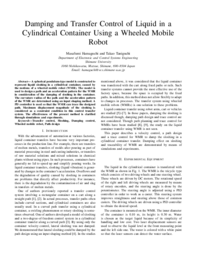
| 内容記述(抄録等) | A spherical pendulum-type model is constructed to represent liquid sloshing in a cylindrical container, caused by the motions of a wheeled mobile robot (WMR). The model is used to design a path and an acceleration pattern for the WMR in consideration of the damping of sloshing in the container. The curvature radius of the path and the acceleration pattern of the WMR are determined using an input shaping method. A PD controller is used so that the WMR can trace the designed path. Maximum displacement magnitude of the sloshing is considered as a constraint condition in this control transfer system. The effectiveness of the present method is clarified through simulations and experiments.
|
| 主題 | Transfer control
Sloshing
Damping control
Wheeled mobile robot
Path design
|
| 掲載誌名 |
Journal of Robotics and Mechatronics
|
| 巻 | 17
|
| 号 | 5
|
| 開始ページ | 546
|
| 終了ページ | 552
|
| ISSN | 09153942
|
| 発行日 | 2005
|
| DOI | |
| NCID | AA10809998
|
| 出版者 | 富士技術出版株式会社
|
| 出版者別表記 | Fuji Technology Press
|
| 資料タイプ |
学術雑誌論文
|
| ファイル形式 |
PDF
|
| 関連情報URL(IsVersionOf) | http://www.fujipress.jp/finder/xslt.php?mode=present&inputfile=ROBOT001700050007.xml
|
| 権利関係 | Fuji Technology Press
|
| 著者版/出版社版 |
著者版
|
| 業績ID | e28207
|
| 部局 |
(旧組織)大学院総合理工学研究科
|